


產(chǎn)品分類(lèi)
更多相關(guān)產(chǎn)品
- LGGY-BL13X型AI智能交互機(jī)器人實(shí)訓(xùn)設(shè)備
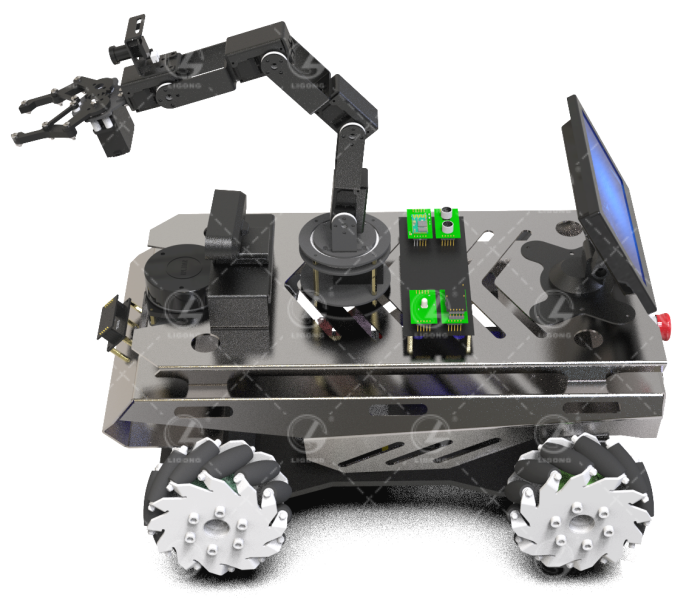
- LGGY-BL12X型基于視覺(jué)的移動(dòng)抓取機(jī)器人 品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
- LGGY-BL11X型移動(dòng)機(jī)器人應(yīng)用開(kāi)發(fā)平臺(tái)
- LGGY-BL10X型機(jī)器人大模型與視覺(jué)自動(dòng)分揀生產(chǎn)線
- LGGY-BL10X型機(jī)器人大模型與視覺(jué)自動(dòng)分揀生產(chǎn)線
- LGGY-BL09X型機(jī)器人大模型與視覺(jué)檢測(cè)生產(chǎn)線
- LGGY-BL08X型機(jī)器人大模型與視覺(jué)協(xié)同控制平臺(tái)
- LGGY-BL07X型六軸機(jī)器人自動(dòng)分揀生產(chǎn)線
- LGGY-BL05X型多模態(tài)機(jī)器人大模型與視覺(jué)協(xié)同系統(tǒng)
- LGGY-BL06X型六軸機(jī)器人視覺(jué)檢測(cè)生產(chǎn)線
- LGGY-BL04X型七軸協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL03X型六軸協(xié)作機(jī)器人實(shí)訓(xùn)設(shè)備
- LGGY-BL02X型桌面六軸機(jī)器人拆裝套件
- LGGY-BL01X型桌面六軸機(jī)器人實(shí)訓(xùn)設(shè)備
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實(shí)訓(xùn)室
- LGGY-DS23型大田耕種機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS22型物理除草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS21型大田作業(yè)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS20型果園噴霧機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS19型果園采摘機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS18型果園應(yīng)用開(kāi)發(fā)通用平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS17型智能割草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS16型雙臂復(fù)合機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
- LGGY-DS14型六自由度機(jī)械臂套件實(shí)訓(xùn)裝置
- LGGY-DS13型具身復(fù)合機(jī)器人創(chuàng)新設(shè)計(jì)套裝實(shí)訓(xùn)裝置(增強(qiáng)版)
- LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS11型基于大模型的智慧零售平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS10型農(nóng)業(yè)智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS09型智能服務(wù)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS08型ROS基礎(chǔ)教學(xué)智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS07型視覺(jué)語(yǔ)音智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS06型人形機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS05型6足18自由度圓形仿生機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS04型無(wú)人駕駛深度學(xué)習(xí)智能車(chē)實(shí)訓(xùn)裝置
- LGGY-DS03型商服機(jī)器人-機(jī)械臂版及場(chǎng)地實(shí)訓(xùn)裝置
- LGGY-DS02型計(jì)算機(jī)視覺(jué)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS01型智能汽車(chē)及賽道實(shí)訓(xùn)裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機(jī)器人視覺(jué)分揀螺母工作站實(shí)訓(xùn)系統(tǒng)
LGGY-BL12X型基于視覺(jué)的移動(dòng)抓取機(jī)器人 品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
一、產(chǎn)品概述
機(jī)器人是綜合自動(dòng)控制、微電子、信息技術(shù)、以及機(jī)械結(jié)構(gòu)于一體的等多學(xué)科交叉的綜合產(chǎn)物。隨著近年來(lái)現(xiàn)代工業(yè)、服務(wù)業(yè)的智能化產(chǎn)業(yè)不斷升級(jí),以移動(dòng)機(jī)器人為載體的智能控制、傳感器融合、信息處理以及協(xié)同作業(yè)發(fā)展迅速,正逐步成為高端智能化研究的熱點(diǎn)與難點(diǎn)。本產(chǎn)品以移動(dòng)機(jī)器人為載體,以機(jī)械手臂為車(chē)載執(zhí)行單元,并配置視覺(jué)、激光雷達(dá)、運(yùn)動(dòng)、語(yǔ)音、超聲波等各類(lèi)傳感器,使得機(jī)器人具備環(huán)境感知、路徑規(guī)劃、智能控制、移動(dòng)抓取、物流輸送等多重功能。通過(guò)對(duì)該系統(tǒng)的應(yīng)用與操作,可以幫助學(xué)生掌握基于人工智能技術(shù)的機(jī)器人運(yùn)動(dòng)控制、傳感器感知、機(jī)械臂和機(jī)器人協(xié)同控制、視覺(jué)巡檢等領(lǐng)域的相關(guān)知識(shí)與實(shí)踐方法。
二、產(chǎn)品功能和特點(diǎn)
1.ROS機(jī)器人操作系統(tǒng)
ROS(Robot Operating System)是一個(gè)適用于機(jī)器人的開(kāi)源操作系統(tǒng)。該系統(tǒng)提供了包括硬件抽象、底層設(shè)備控制、常用函數(shù)的實(shí)現(xiàn)、進(jìn)程間消息傳遞等系統(tǒng)級(jí)服務(wù),可為機(jī)器人應(yīng)用和開(kāi)發(fā)提供極具開(kāi)放性和拓展性的支持。
2.移動(dòng)機(jī)器人姿態(tài)控制
機(jī)器人內(nèi)置陀螺儀、加速度計(jì)等,可實(shí)時(shí)采集機(jī)器人的速度、位置以及航向角、俯仰角等姿態(tài)數(shù)據(jù),并據(jù)此實(shí)現(xiàn)對(duì)自身狀態(tài)的實(shí)時(shí)監(jiān)測(cè)和調(diào)整。
3.激光SLAM建圖與導(dǎo)航
采用高精度激光雷達(dá),通過(guò)每秒8000次的激光測(cè)距,為機(jī)器人實(shí)現(xiàn)半徑12米內(nèi)的環(huán)境感知,從而構(gòu)建實(shí)時(shí)精準(zhǔn)的地圖基礎(chǔ)數(shù)據(jù)。
4.AI+物流搬運(yùn)
依托激光雷達(dá),預(yù)先建立室內(nèi)地圖,通過(guò)移動(dòng)機(jī)器人、機(jī)械手臂與視覺(jué)系統(tǒng)三者結(jié)合,使得機(jī)器人可以自主完成將物體在多點(diǎn)之間搬運(yùn)的功能。
三、主要硬件參數(shù)
1.系統(tǒng)性能
系統(tǒng)采用運(yùn)動(dòng)控制處理器與中央處理器構(gòu)建雙處理器模塊,完成小車(chē)任務(wù)規(guī)劃與系統(tǒng)運(yùn)動(dòng)控制。內(nèi)置Ubuntu操作系統(tǒng),通過(guò)ROS有效完成對(duì)機(jī)器人的多任務(wù)進(jìn)行實(shí)時(shí)管理,同時(shí)提供通信、數(shù)據(jù)采集、人機(jī)交互以及外圍傳感器拓展的接口。
2.運(yùn)動(dòng)控制模塊
在機(jī)器人中用到很多控制器和外設(shè),包括:處理器、激光雷達(dá),STM32控制器,電機(jī)、編碼器、雙路驅(qū)動(dòng)、藍(lán)牙、PS2有線手柄、航模遙控、陀螺儀等,同時(shí)提供了串口1和CAN接口方便用戶拓展控制。
3.ROS操作系統(tǒng)
ROS操作系統(tǒng)內(nèi)置于中央處理器內(nèi),通過(guò)RTOS完成系統(tǒng)任務(wù)調(diào)度與管理。具體任務(wù)調(diào)度管理流程如圖所示。RTOS任務(wù)調(diào)度器根據(jù)任務(wù)的優(yōu)先級(jí)決定任務(wù)的執(zhí)行順序,每個(gè)任務(wù)執(zhí)行的時(shí)間很短,因此幾乎等效于所有任務(wù)同時(shí)執(zhí)行,期間如果發(fā)生中斷則去響應(yīng)中斷。串口2中斷用于APP藍(lán)牙控制,串口3中斷用于接收ROS傳過(guò)來(lái)的信息。
4.激光雷達(dá)和SLAM建圖
激光雷達(dá)是一種采用非接觸激光測(cè)距技術(shù)的掃描式傳感器,通過(guò)發(fā)射激光光束來(lái)探測(cè)目標(biāo),并通過(guò)搜集反射回來(lái)的光束來(lái)形成點(diǎn)云和獲取數(shù)據(jù)。這些數(shù)據(jù)經(jīng)光電處理后可生成為精確的三維立體圖像,能夠準(zhǔn)確的獲取高精度的物理空間環(huán)境信息,測(cè)距精度可達(dá)厘米級(jí);它猶如一雙“眼睛”,讓機(jī)器人擁有實(shí)時(shí)感知環(huán)境的能力。
本系統(tǒng)采用國(guó)產(chǎn)激光雷達(dá),為機(jī)器人完成測(cè)量半徑12米內(nèi)的環(huán)境感知,雷達(dá)通過(guò)每秒8000次激光測(cè)距,可提供實(shí)時(shí)精準(zhǔn)的地圖構(gòu)建基礎(chǔ)數(shù)據(jù)。此外,系統(tǒng)采用光磁融合技術(shù)徹底解決了傳統(tǒng)激光雷達(dá)因物理接觸磨損導(dǎo)致電氣連接失效、激光雷達(dá)壽命短的問(wèn)題。
5.視覺(jué)感知系統(tǒng)
視覺(jué)感知系統(tǒng)采用一顆200萬(wàn)像素網(wǎng)絡(luò)攝像頭,可兼容ubuntu,linux和樹(shù)莓派等操作系統(tǒng)。與移動(dòng)機(jī)器人協(xié)同使用時(shí),可實(shí)現(xiàn)對(duì)視野中的環(huán)境信息的成像、分析和判斷,并根據(jù)判斷結(jié)果對(duì)機(jī)器人的動(dòng)作進(jìn)行引導(dǎo),如減速、轉(zhuǎn)向、直行等,從而完成多種豐富的功能。
6.機(jī)械手臂
通過(guò)機(jī)械手臂的參與,可使得移動(dòng)機(jī)器人在環(huán)境中運(yùn)動(dòng)的同時(shí),還可以實(shí)現(xiàn)與環(huán)境的交互,如目標(biāo)抓取、物流搬運(yùn)等。
7.車(chē)載處理單元
車(chē)載處理單元采用NVIDIA公司的Jetson Nano處理器,該處理器作為實(shí)驗(yàn)箱的核心模塊,預(yù)裝Linux操作系統(tǒng),部署所有智能產(chǎn)品模塊所需的全部軟件框架和SDK,并提供通用的通訊接口。
四、實(shí)驗(yàn)項(xiàng)目
1、ROS機(jī)器人操作系統(tǒng)
(1)ROS簡(jiǎn)介
(2)Linux系統(tǒng)與代碼操作
(3)ROS功能包的創(chuàng)建及編譯
(4)ROS的launch文件演示
(5)ROS話題通訊
(6)ROS服務(wù)通訊
(7)ROS參數(shù)服務(wù)器
(8)ROS激光雷達(dá)認(rèn)識(shí)
(9)ROS導(dǎo)航的概念
(10)激光雷達(dá)SLAM建圖
(11)ROS導(dǎo)航Navigation使用
2、移動(dòng)機(jī)器人運(yùn)動(dòng)控制
(1)移動(dòng)機(jī)器人認(rèn)知
(2)ROS操作系統(tǒng)配置實(shí)驗(yàn)
(3)移動(dòng)機(jī)器人基礎(chǔ)操作實(shí)驗(yàn)
(4)激光雷達(dá)跟隨運(yùn)動(dòng)目標(biāo)實(shí)驗(yàn)
(5)激光雷達(dá)SLAM建圖實(shí)驗(yàn)
(6)激光雷達(dá)SLAM導(dǎo)航實(shí)驗(yàn)
(7)利用陀螺儀進(jìn)行上下坡輔助實(shí)驗(yàn)
(8)視覺(jué)跟隨實(shí)驗(yàn)
(9)交通標(biāo)志識(shí)別實(shí)驗(yàn)
(10)移動(dòng)機(jī)器人自動(dòng)導(dǎo)航實(shí)驗(yàn)
(11)手勢(shì)控制移動(dòng)機(jī)器人運(yùn)動(dòng)實(shí)驗(yàn)
(12)語(yǔ)音控制移動(dòng)機(jī)器人運(yùn)動(dòng)實(shí)驗(yàn)
(13)移動(dòng)機(jī)器人超聲波避障實(shí)驗(yàn)
3、基于視覺(jué)的機(jī)器人物流搬運(yùn)
(1)機(jī)械臂認(rèn)知和基礎(chǔ)操作
(2)機(jī)械臂示教和運(yùn)動(dòng)控制
(3)機(jī)械臂與視覺(jué)系統(tǒng)標(biāo)定
(4)基于視覺(jué)的機(jī)械臂目標(biāo)分類(lèi)
(5)基于視覺(jué)的機(jī)械臂垃圾分揀
(6)基于視覺(jué)的機(jī)器人物流輸送
五、綜合實(shí)訓(xùn)項(xiàng)目
1.機(jī)械臂的控制
機(jī)械臂主要由五路舵機(jī)和金屬結(jié)構(gòu)組成,通過(guò)對(duì)單個(gè)或多個(gè)舵機(jī)進(jìn)行控制,運(yùn)動(dòng)到指定角度,即實(shí)現(xiàn)機(jī)械臂的控制。機(jī)械臂安裝于底座上方,可在底座舵機(jī)的驅(qū)動(dòng)下進(jìn)行180°的旋轉(zhuǎn),機(jī)械臂自身可在空間中執(zhí)行任意點(diǎn)的運(yùn)動(dòng),同時(shí),機(jī)械臂自帶有夾爪,可完成對(duì)指定物體的抓取。實(shí)訓(xùn)中,通過(guò)對(duì)舵機(jī)和夾爪的控制,可操作機(jī)械臂完成各種豐富的動(dòng)作。
2.機(jī)器人視覺(jué)移動(dòng)抓取
針對(duì)智慧物流的場(chǎng)景,機(jī)器人運(yùn)動(dòng)到指定坐標(biāo)后,通過(guò)車(chē)載處理單元向視覺(jué)系統(tǒng)發(fā)送指令,如識(shí)別視野中的紅色目標(biāo),視覺(jué)系統(tǒng)根據(jù)該信息,對(duì)當(dāng)前視野中的物體進(jìn)行圖像采集,識(shí)別其中具備紅色特征的物體,并控制機(jī)械臂對(duì)該物體完成抓取,隨后,機(jī)器人運(yùn)動(dòng),將該物體搬運(yùn)到指定目的地。
3.機(jī)器人姿態(tài)控制實(shí)踐
采用機(jī)器人配置的超聲波傳感器、聲音檢測(cè)傳感器、運(yùn)動(dòng)傳感器等,實(shí)時(shí)感知障礙物或者追蹤對(duì)象,并將感知結(jié)果反饋給主控單元,進(jìn)而控制運(yùn)動(dòng)部件的運(yùn)動(dòng),如跟隨熱源運(yùn)動(dòng)、按照聲音指令運(yùn)動(dòng)等。通過(guò)車(chē)載的陀螺儀,監(jiān)測(cè)機(jī)器人的姿態(tài),當(dāng)機(jī)器人在上下坡時(shí),通過(guò)陀螺儀的監(jiān)測(cè)結(jié)果,控制機(jī)器人執(zhí)行上下坡減速、駐車(chē)的動(dòng)作。