


產(chǎn)品分類
更多相關(guān)產(chǎn)品
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實(shí)訓(xùn)室
- LGGY-DS23型大田耕種機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS22型物理除草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS21型大田作業(yè)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS20型果園噴霧機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS19型果園采摘機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS18型果園應(yīng)用開發(fā)通用平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS17型智能割草機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS16型雙臂復(fù)合機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS15型七自由度機(jī)械臂實(shí)訓(xùn)裝置
- LGGY-DS14型六自由度機(jī)械臂套件實(shí)訓(xùn)裝置
- LGGY-DS13型具身復(fù)合機(jī)器人創(chuàng)新設(shè)計(jì)套裝實(shí)訓(xùn)裝置(增強(qiáng)版)
- LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS11型基于大模型的智慧零售平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS10型農(nóng)業(yè)智能車實(shí)訓(xùn)裝置
- LGGY-DS09型智能服務(wù)機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS08型ROS基礎(chǔ)教學(xué)智能車實(shí)訓(xùn)裝置
- LGGY-DS07型視覺語音智能車實(shí)訓(xùn)裝置
- LGGY-DS06型人形機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS05型6足18自由度圓形仿生機(jī)器人實(shí)訓(xùn)裝置
- LGGY-DS04型無人駕駛深度學(xué)習(xí)智能車實(shí)訓(xùn)裝置
- LGGY-DS03型商服機(jī)器人-機(jī)械臂版及場(chǎng)地實(shí)訓(xùn)裝置
- LGGY-DS02型計(jì)算機(jī)視覺平臺(tái)實(shí)訓(xùn)裝置
- LGGY-DS01型智能汽車及賽道實(shí)訓(xùn)裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機(jī)器人視覺分揀螺母工作站實(shí)訓(xùn)系統(tǒng)
- LGGY-WH05型工業(yè)機(jī)器人維護(hù)維修基礎(chǔ)教學(xué)工作站
- LGGY-F6A型服務(wù)機(jī)器人應(yīng)用技術(shù)實(shí)訓(xùn)平臺(tái)
- LGGY-K50型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-R04型工業(yè)機(jī)器人一體化實(shí)訓(xùn)平臺(tái)
- LGGY-R02B型智能生產(chǎn)線運(yùn)行與維護(hù)綜合實(shí)訓(xùn)裝置
- LGGY-T03A型智能制造單元系統(tǒng)集成應(yīng)用平臺(tái)
- LGGY-W01A型工業(yè)機(jī)器人應(yīng)用工作站
- LGGY-S2型工業(yè)機(jī)器人與智能視覺系統(tǒng)應(yīng)用實(shí)驗(yàn)平臺(tái)
- LG-MPS02型模塊化柔性自動(dòng)化生產(chǎn)線實(shí)訓(xùn)系統(tǒng)(八站)
- LGJ-IMS03型工業(yè)機(jī)器人模塊化智能生產(chǎn)線實(shí)訓(xùn)系統(tǒng)
- LGJ-KY02型智能機(jī)器人智能制造綜合實(shí)操工作站
- LGJ-QBJ01型工業(yè)機(jī)器人模擬汽車領(lǐng)金沖壓集成制造實(shí)訓(xùn)系統(tǒng)
- LGJ-CNC02型工業(yè)機(jī)器人智能生產(chǎn)流水線實(shí)訓(xùn)平臺(tái)
- LGJ-ZH03型工業(yè)機(jī)器人組合式應(yīng)用實(shí)訓(xùn)裝置
LGGY-DS12型便攜式ROS導(dǎo)航機(jī)器人學(xué)習(xí)平臺(tái)實(shí)訓(xùn)裝置
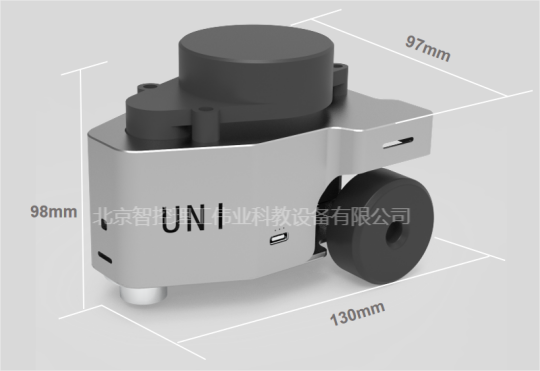
※1.機(jī)器人本體
構(gòu)型:雙驅(qū)三輪差速底盤
尺寸:長(zhǎng)*寬*高不大于140mm*100mm*100mm;
重量:不大于600g;
速度:不小于0.15m/s;
精度:1m內(nèi)定位精度不大于10mm;
直線度:1m直線度偏差不大于1.5cm;
2.機(jī)器人控制
控制器:Broadcom BCM2710A1, quad-core 64-bit SoC(Arm Cortex-A53 @ 1GHz);
操作系統(tǒng):ROS操作系統(tǒng);
※機(jī)器人話題清單:獲取左輪編碼器數(shù)值,獲取左輪輪里程,獲取左輪當(dāng)前速度,設(shè)置左輪電機(jī)pid,獲取右輪編碼器數(shù)值,獲取右輪當(dāng)前速度,獲取右輪電機(jī)當(dāng)前pid,設(shè)置右輪電機(jī)pid,獲取雷達(dá)原始數(shù)據(jù),獲取雷達(dá)切割完小車模型數(shù)據(jù),獲取小車?yán)锍绦畔ⅰ?/span>
3.機(jī)器人傳感器
激光雷達(dá):頂部雷達(dá)直徑尺寸不大于62mm,檢測(cè)距離不小于0.1-10m;采樣頻率10Hz;
導(dǎo)航方式:Catographer、Hector、Gampping;
4.機(jī)器人電源及驅(qū)動(dòng)
電源:機(jī)器人內(nèi)置電源,持續(xù)工作續(xù)航時(shí)間不小于3.5h,Type-C充電;
驅(qū)動(dòng):采用7位編碼電機(jī);
5.場(chǎng)地
模塊化拼接場(chǎng)地,可搭建4種0.6m*0.6m桌面式場(chǎng)地,配置拼接板最大可擴(kuò)展1.2m*1.2m場(chǎng)地。
6.配件:1.5米長(zhǎng)Type-C數(shù)據(jù)線*1(含充電插頭);
※7.實(shí)驗(yàn)項(xiàng)目
配置24課時(shí)實(shí)驗(yàn)項(xiàng)目,包含體驗(yàn)ROS的運(yùn)行實(shí)驗(yàn),構(gòu)建ROS功能包實(shí)驗(yàn),快速操作移動(dòng)機(jī)器人導(dǎo)航實(shí)驗(yàn),Catgrapher構(gòu)建地圖導(dǎo)航實(shí)驗(yàn),Hector構(gòu)建地圖導(dǎo)航實(shí)驗(yàn),Gampping構(gòu)建地圖導(dǎo)航實(shí)驗(yàn),輪的PID控制與調(diào)試,移動(dòng)機(jī)器人的運(yùn)動(dòng)學(xué)控制實(shí)驗(yàn)。
8.資源
教程資料:提供實(shí)驗(yàn)項(xiàng)目參數(shù)中所有實(shí)驗(yàn)的詳細(xì)教程,紙質(zhì)版本和電子版本各一份。
開源資料:提供所有例程源碼;提供樣機(jī)三維模型圖和樣機(jī)仿真三維模型。
課程支持:《機(jī)器人操作系統(tǒng)ROS》、《移動(dòng)機(jī)器人導(dǎo)航與定位》、《自動(dòng)控制原理PID》等。